
Humans interact with the environment in a dexterous and highly efficient way that is unmatched by any other living organism. However, using three arms and hands instead of only two would allow for a seemingly infinite number of new possibilities to interact with the world around us. The goal of our research project NIMA is to make this vision a reality. We studied how to advance human movement abilities beyond bimanual interaction and lay the foundations for the new field of “supernumerary manipulation”.
This approach could take human motor capacities to a new level and allow humans to perform tasks that are impossible to perform with the natural limbs alone. Wearable supernumerary limbs, surgical devices, computers or mobile devices will be voluntarily controlled together with and independently of natural limbs. Control of such supernumerary effectors will be flexible, adaptable and able to be coordinated with the natural limbs, thus enabling motor capacities far beyond those of current tools or prostheses. These supernumerary effectors will provide multisensory (e.g. proprioceptive, tactile, temperature) feedback supporting natural and effortless use. This will be achieved in an entirely non-invasive approach to minimise risks and maximise applicability.
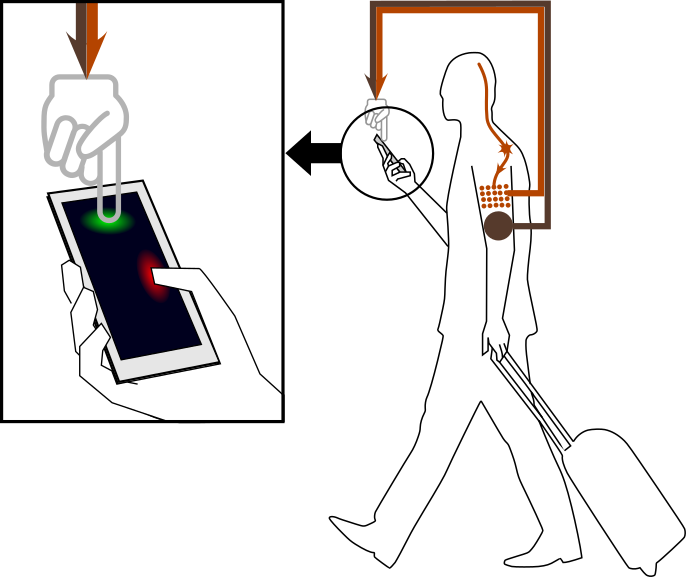
The reach of such movement augmentation is far, with applications ranging from work in industrial environments (e.g. overhead work in aircraft assembly), and surgical environments, to everyday applications where subjects can control their smartphone apps while simultaneously using their hands.
In NIMA we investigated the application of this technology in
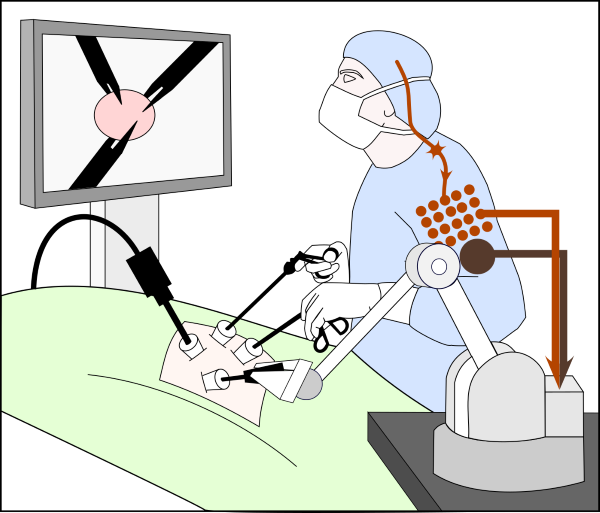
(i) laparoscopic surgery, where a surgical tool controlled in an intuitive way and work in conjunction with the two instruments held by the surgeon’s natural hands;
(ii) 3-hand manipulation using a wearable supernumerary limb;
(iii) augmented user interfaces for computers and mobile devices.
NIMA provided the first scientific knowledge base of the cognitive, computational and neural mechanisms underlying human movement augmentation. A dedicated work package investigated safety and establish basic ethical principles for how to responsibly employ movement augmentation for the greater good of human society.